
第五章 设备管理
5.1 I/O系统
5.1.1 I/O系统的基本结构
(1) 硬件基本结构

(2) I/O系统组成成分:
I/O设备
具体完成数据I/O的设备。
分类
按速率分类:低速设备(键盘),中速设备(打印机),高速设备(磁盘).
按信息交换单位分类:字符设备(键盘), 块设备(磁盘)。
设备控制器
负责连接I/O设备和数据总线,完成设备控制和数据格式转换。
功能
接收和识别命令
数据交换
标志和报告设备状态
地址识别
数据缓冲
差错控制
编址: 端口(I/O端口)
I/O通道
I/O通道
目的是使原来由CPU处理的I/O任务转由通道来承担,从而把CPU从繁杂的I/O任务中解脱出来。
I/O通道是—种特殊的处理器,专门负责输入/输出。它具有自己的指令系统,但该指令系统比较简单,
一般只有数据传送指令、设备控制指令等;
通道没有自己的内存,通道所执行的程序(即通道程序)是存放在主机内存中的,它与CPU共享内存。
编址: 端口(I/O端口)
(3) I/O系统结构
单通路I/O系统
多通路I/O系统
单通路I/O系统

无冗余设备,容错性差
多通路I/O系统
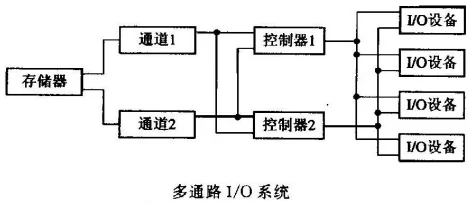
有冗余设备,容错性佳
5.1.2 I/O控制方式
设备管理的主要任务之一,是控制设备和内存或CPU之间的数据传送,外围设备和内存之间常用的数据传送控制方式有四种:
程序I/O方式
中断驱动I/O控制方式
直接存储器存取方式-DMA
通道控制方式
通道控制方式与DMA方式相类似,也是一种内存和设备直接进行数据交换的方式。
与DMA方式不同的是,在通道控制方式中,数据传送方向存放数据的内存始址及传送的数据块长度均由一个专门负责输入/输出的硬件--通道来控制。
另外,DMA方式每台设备至少需要一个DMA控制器,而通道控制方式中,一个通道可控制多台设备与内存进行数据交换。
通道指令:
操作码:它规定指令所执行的操作,如读、写等。
内存地址:标明数据传送时内存的首址。
计数:表示传送数据的字节数。
通道程序结束位R0,表示通道程序是否结束。
记录结束标志R1,表示所处理的记录是否结束。
通道程序(存放在内存中)
一个由六条通道指令所构成的简单的通道程序。该程序的功能是将内存中不同地址的数据,写成多个记录。其中,前三条指令是分别将813-892单元中的80个字符和1034 -1173单元中的140个字符及5830 - 5889单元中的60个字符写成一个记录;第4条指令是单独写一个具有300个字符的记录;第5、6条指令共写含500个字符的记录。
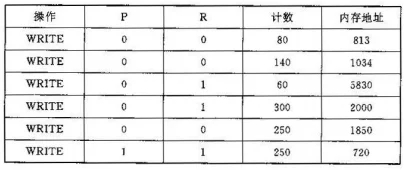
注:前三条构成一条记录(R2=0),最后两条构成一条记录(R5=0).
5.2 缓冲管理
5.2.1 缓冲的引入
(1) 引入缓冲的原因
缓和CPU和I/O设备的矛盾;
减少CPU中断的频率;
提高CPU和I/O设备的并行性;
5.2.2 单缓冲
(1) 原理

(2) 处理时间
M+MAX(C,T);
5.2.3 双缓冲(缓冲对换)
(1) 原理

(2) 处理时间:MAX(C,T)
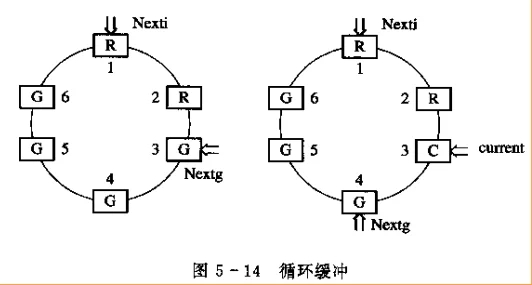
5.2.4 循环缓冲
(1) 原理

(2) 实现
5.2.5 缓冲池(公用缓冲池)
(1) 原理

(2) 两个基本操作
GetBuf();
PutBuf();
(2) 工作方式
收容输入;
提取输入;
收容输出;
提取输出;
5.3 设备分配
5.3.1 设备分配的基本概念
(1) 设备类型对设备分配的影响
独占设备 → 独占分配
指在一段时间内只允许一个用户(进程)使用的设备。系统一旦把该设备分配给某进程后,便让它独占直至释放。注意:独占设备的分配可能会引起进程死锁。
共享设备 → 共享分配
指在一段时间内允许多个进程同时访问的设备。共享设备必须是可寻址的和可随机访问的设备。典型的共享设备是磁盘。共享设备不仅能获得良好的设备利用率,而且是实现文件和数据共享的物质基础。
虚拟设备 → 共享分配
指通过某种技术将一台独占设备变换为能供若干个用户共享的设备。可将其同时分配给多个用户,从而提高设备的利用率。SPOOLing技术是一类典型的虚拟设备技术。
(2) 设备分配算法和安全性
设备分配算法: 先来先服务、优先级高者优先
设备分配的安全性
安全方式:串行分配,一个一个分配。
不安全方式:并行分配,可同时分配多个设备资源。
5.3.2 设备独立性
(1) 设备独立性基本概念
设备独立性定义: 用户程序独立于具体使用的物理设备。
(2) 设备独立性实现:逻辑设备与物理设备
核心:采用虚拟技术,编写应用程序时不考虑实际的物理设备。
引入逻辑设备和物理设备:
物理设备:应用程序实际执行时,使用的特定类型设备;
逻辑设备:是对一组具备相同功能物理设备的抽象,
基本作法:
编写程序时,使用逻辑设备名称访问设备;
程序执行时,使用具体的物理设备完成实际数据操作;
(2) 设备独立性实现:逻辑设备到物理设备的映射
程序执行时,使用逻辑设备表完成逻辑设备到物理设备的映射。
逻辑设备表(LUT)
逻辑设备名
物理设备名
驱动程序入口
/dev/tty
3
0x00001024
/dev/printer
5
0x00002034
…
…
…
注意:需要每个用户一张LUT
(3) 设备独立性优点
设备分配时的灵活性
若进程以物理设备名称请求使用指定某台设备,如果该设备已经分配给其他进程或正在检修,此时尽管还有其它的相同设备空闲,该进程仍会阻塞。
但若进程能以逻辑设备名称来请求某类设备时,系统可立即将该类设备中的任一台分配给进程。
易于实现I/O重定向
指用于I/O操作的设备可以更换(即重定向),而不必改变应用程序。
例如:调试应用程序时,可将程序的所有输出送往屏幕显示;而在程序调试完后,如需正式将程序的运行结果打印出来,此时将I/O重定向的数据结构(逻辑设备表)中的显示终端改为打印机,而不必修改应用程序。
5.3.2 SPOOLing技术
(1) SPOOLing技术(Simultaneous Peripheral Operations On-line)
概述:(为缓和CPU的高速性与I/O设备低速性之间的矛盾)
早期:引入脱机输入、脱机输出技术:利用专门的外围控制机,将低速I/O设备上的数据传送到高速磁盘上;或者相反。
现在:在引入多道程序技术后,可以利用系统中的进程,来模拟外围控制机功能,从而:
把低速I/O设备上的数据传送到高速磁盘上;
把数据从磁盘传送到低速输出设备上。
这徉,便可在主机的直接控制下,实现脱机输入、输出功能。
(2) SPOOLing基本组成
输入井和输出井
输入缓冲区和输出缓冲区
输入进程和输出进程
(3) 共享打印机: SPOOLing系统的典型应用
(4) SPOOLing特点
提高I/O速度
改造独占设备为共享设备
实现虚拟设备
5.4 磁盘存储管理
5.4.1 磁盘工作原理
硬盘由多个盘片(platters)构成
盘片转速: 5400RPM 7200RPM 10000RPM
磁盘数据定位:磁头号 磁道号 扇区号
磁盘访问时间: T = Ts + Tr + Tt
寻道时间Ts :
Ts = 8 ~10ms旋转延迟时间Tr :
Tr = 1/(2r)传输时间Tt:
Tt = b/(rN )
r: 为转速; N: 每磁道字节数; b: 传输字节数
转速(RPM)
Ts(ms)
Tr(ms)
Tt(ms)
5400
8-10
5.5
0.1
7200
8-10
4.3
0.07
1000
8-10
3
0.05
结论: Ts > Tr >> Tt .
注:b/N = 1/128 .
5.4.2 磁盘调度算法
磁盘是可供多个进程共享的设备,当有多个进程都要求访问磁盘时,应采用一种最佳调度算法,以使各进程对磁盘的平均访问时间最小。
由于在访问磁盘的时间中,主要是寻道时间,因此,磁盘调度的目标,是使磁盘的平均寻道时间最少。
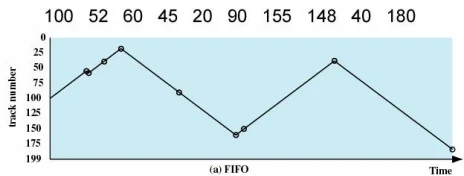
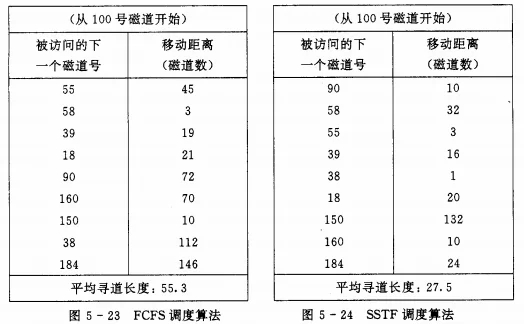
先来先服务调度算法(FCFS)
根据进程请求磁盘的先后次序进行调度。
特点:公平、简单,每个进程的请求都能依次地得到处理,不会出现某一进程的请求长期得不到满足的情况。
最短寻道时间优先调度算法(SSTF)
要求访问的磁道,与当前磁头所在的磁道距离最近,以使每次的寻道时间最短。
特点: SSTF的平均每次磁头移动距离,明显低于FCFS,因而SSTF较FCFS有更好的寻道性能。
“磁臂粘着”现象。

“磁臂粘着”现象就是指当系统不断的提出对当前磁道的访问,那么磁头会一直处于该磁道上进行磁道访问请求,导致其它磁道的访问被推迟的现象。
注: “磁臂粘着”现象的图片没找到, 猜想类似正弦函数, 沿某一轴线来回震荡.
FCFS和SSTF算法比较:
扫描算法(SCAN)
在磁头移动方向上,且要求访问的磁道,与当前磁头所在的磁道距离最近,以使每次的寻道时间最短。
特点: 有效解决磁臂粘着现象。

循环扫描算法(CSCAN)
即为单向SCAN。只在一个磁头移动方向上满足磁道访问请求(注: 有一个方向是空操作. e.g.图中中段.)。要求访问的磁道,与当前磁头所在的磁道距离最近,以使每次的寻道时间最短。
特点: 有效降低磁道请求最大延迟。
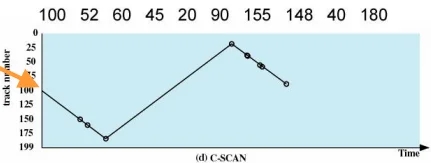
注: 磁头最终循环一圈, 回到原点, 故为循环.
5.4.3 磁盘高速缓存(Disk Cache)
实现技术
数据交付
置换算法:LRU
周期性写回
5.4.4 提高磁盘I/O速度的其他方法
提前读
延迟写
优化物理块分布
Last updated